SENSOR INFRARED (PIR AND OBSTACLE)
1. Tujuan [kembali]
- Merangkai dan menguji sensor infra-merah (pir and obstacle ir)
- Merangkai alat sesuai dengan kegunaan sensor
- Merangkai dan menguji aplikasi input dan output arduino uno
2. Landasan Teori [kembali]
A. Infrared sensor
Infra red (IR) detektor atau sensor infra merah adalah komponen elektronika yang dapat mengidentifikasi cahaya infra merah (infra red, IR). Sensor infra merah atau detektor infra merah saat ini ada yang dibuat khusus dalam satu modul dan dinamakan sebagai IR Detector Photomodules. IR Detector Photomodules merupakan sebuah chip detektor inframerah digital yang di dalamnya terdapat fotodiode dan penguat (amplifier).
Bentuk dan Konfigurasi Pin IR Detector Photomodules TSOP

Konfigurasi pin infra red (IR) receiver atau penerima infra merah tipe TSOP adalah output (Out), Vs (VCC +5 volt DC), dan Ground (GND). Sensor penerima inframerah TSOP ( TEMIC Semiconductors Optoelectronics Photomodules ) memiliki fitur-fitur utama yaitu fotodiode dan penguat dalam satu chip, keluaran aktif rendah, konsumsi daya rendah, dan mendukung logika TTL dan CMOS. Detektor infra merah atau sensor inframerah jenis TSOP (TEMIC Semiconductors Optoelectronics Photomodules) adalah penerima inframerah yang telah dilengkapi filter frekuensi 30-56 kHz, sehingga penerima langsung mengubah frekuensi tersebut menjadi logika 0 dan 1. Jika detektor inframerah (TSOP) menerima frekuensi carrier tersebut, maka pin keluarannya akan berlogika 0. Sebaliknya, jika tidak menerima frekuensi carrier tersebut, maka keluaran detektor inframerah (TSOP) akan berlogika 1.
B. PIR sensor
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu object. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.

Gambar sensor PIR
Sensor ini biasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor.
Sensor PIR terdiri dari beberapa bagian yaitu :
- Lensa Fresnel
- Penyaring Infra Merah (Sensor)
- Sensor Pyroelektrik (Sensor)
- Penguat Amplifier
- Komparator


Cara kerja pembacaan sensor PIR
Pancaran infra merah masuk melalui lensa Fresnel dan mengenai sensor pyroelektrik, karena sinar infra merah mengandung energi panas maka sensor pyroelektrik akan menghasilkan arus listrik. Sensor pyroelektrik terbuat dari bahan galium nitrida (GaN), cesium nitrat (CsNo3) dan litium tantalate (LiTaO3). Arus listrik inilah yang akan menimbulkan tegangan dan dibaca secara analog oleh sensor. Kemudian sinyal ini akan dikuatkan oleh penguat dan dibandingkan oleh komparator dengan tegangan referensi tertentu (keluaran berupa sinyal 1-bit). Jadi sensor PIR hanya akan mengeluarkan logika 0 dan 1, 0 saat sensor tidak mendeteksi adanya perubahan pancaran infra merah dan 1 saat sensor mendeteksi infra merah. Sensor PIR didesain dan dirancang hanya mendeteksi pancaran infra merah dengan panjang gelombang 8-14 mikrometer. Diluar panjang gelombang tersebut sensor tidak akan mendeteksinya. Untuk manusia sendiri memiliki suhu badan yang dapat menghasilkan pancaran infra merah dengan panjang gelombang antara 9-10 mikrometer (nilai standar 9,4 mikrometer), panjang gelombang tersebut dapat terdeteksi oleh sensor PIR. (Secara umum sensor PIR memang dirancang untuk mendeteksi infra merah tubuh manusia). Sensor ini hanya akan mendeteksi jika object bergerak atau secara teknis saat perubahan pancaran infra merah (falling up atau falling down)
Jarak pancar sensor PIR
Sensor PIR memiliki jangkauan jarak dan sudut pembacaan yang bervariasi, tergantung karakteristik sensor. Proses penginderaan sensor PIR dapat digambarkan sebagai berikut:


Pada umumnya sensor PIR memiliki jangkauan pembacaan efektif hingga 5 meter, dan sensor ini sangat efektif digunakan sebagai human detector.
C. Arduino uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Uno berbeda dengan semua board sebelumnya dalam hal koneksi USB-to-serial yaitu menggunakan fitur Atmega8U2 yang diprogram sebagai konverter USB-to-serial berbeda dengan board sebelumnya yang menggunakan chip FTDI driver USB-to-serial.
Nama “Uno” berarti satu dalam bahasa Italia, untuk menandai peluncuran Arduino 1.0. Uno dan versi 1.0 akan menjadi versi referensi dari Arduino. Uno adalah yang terbaru dalam serangkaian board USB Arduino, dan sebagai model referensi untuk platform Arduino, untuk perbandingan dengan versi sebelumnya, lihat indeks board Arduino.
Summary
Microcontroller ATmega328
Operasi dengan daya 5V Voltage
Input Tegangan (disarankan) 7-12V
Input Tegangan (batas) 6-20V
Digital I / O Pins 14 (dimana 6 memberikan output PWM)
Analog Input Pin 6
DC Lancar per I / O Pin 40 mA
Saat 3.3V Pin 50 mA DC
Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Microcontroller ATmega328
Operasi dengan daya 5V Voltage
Input Tegangan (disarankan) 7-12V
Input Tegangan (batas) 6-20V
Digital I / O Pins 14 (dimana 6 memberikan output PWM)
Analog Input Pin 6
DC Lancar per I / O Pin 40 mA
Saat 3.3V Pin 50 mA DC
Flash Memory 32 KB (ATmega328) yang 0,5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Daya
Uno Arduino dapat diaktifkan melalui koneksi USB atau dengan catu daya eksternal (otomatis).
Eksternal (non-USB) daya dapat berasal baik dari AC-ke adaptor-DC atau baterai. Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER. Ujung kepala dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor POWER.
Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak board Uno.
Pin listrik adalah sebagai berikut:
VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan sumber daya eksternal (sebagai pengganti dari 5 volt koneksi USB atau sumber daya lainnya).
5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya.
3v3. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board.
GND. Ground pin.
Memori
ATmega328 memiliki 32 KB (dengan 0,5 KB digunakan untuk bootloader), 2 KB dari SRAM dan 1 KB EEPROM (yang dapat dibaca dan ditulis dengan EEPROM liberary).
Input dan Output
Masing-masing dari 14 pin digital di Uno dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode (), digitalWrite (), dan digitalRead (), beroperasi dengan daya 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor (secara default terputus) dari 20-50 kOhms. Selain itu, beberapa pin memiliki fungsi khusus:
Serial: 0 (RX) dan 1 (TX). Digunakan untuk menerima (RX) dan mengirimkan (TX) TTL data serial. Pin ini dihubungkan ke pin yang berkaitan dengan chip Serial ATmega8U2 USB-to-TTL.
Eksternal menyela: 2 dan 3. Pin ini dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah, dengan batasan tepi naik atau turun, atau perubahan nilai. Lihat (attachInterrupt) fungsi untuk rincian lebih lanjut.
PWM: 3, 5, 6, 9, 10, dan 11. Menyediakan output PWM 8-bit dengan fungsi analogWrite ().
SPI: 10 (SS), 11 (Mosi), 12 (MISO), 13 (SCK). Pin ini mendukung komunikasi SPI menggunakan SPI library.
LED: 13. Ada built-in LED terhubung ke pin digital 13. Ketika pin bernilai nilai HIGH, LED on, ketika pin bernilai LOW, LED off.
Uno memiliki 6 masukan analog, berlabel A0 sampai dengan A5, yang masing-masing menyediakan 10 bit dengan resolusi (yaitu 1024 nilai yang berbeda). Selain itu, beberapa pin memiliki fungsi khusus:
I2C: A4 (SDA) dan A5 (SCL). Dukungan I2C (TWI) komunikasi menggunakan perpustakaan Wire.
Aref. Tegangan referensi (0 sampai 5V saja) untuk input analog. Digunakan dengan fungsi analogReference ().
Reset. Bawa baris ini LOW untuk me-reset mikrokontroler.
Lihat juga mapping pin Arduino dan port ATmega328.
D. LED
Pengertian LED (Light Emitting Diode) dan Cara Kerjanya
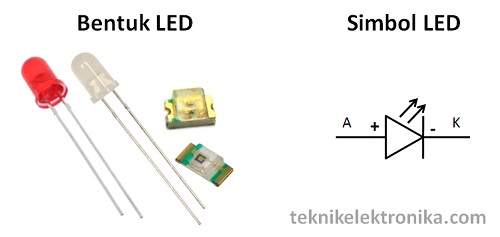
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya.
Bentuk LED mirip dengan sebuah bohlam (bola lampu) yang kecil dan dapat dipasangkan dengan mudah ke dalam berbagai perangkat elektronika. Berbeda dengan Lampu Pijar, LED tidak memerlukan pembakaran filamen sehingga tidak menimbulkan panas dalam menghasilkan cahaya. Oleh karena itu, saat ini LED (Light Emitting Diode) yang bentuknya kecil telah banyak digunakan sebagai lampu penerang dalam LCD TV yang mengganti lampu tube.
Simbol dan Bentuk LED (Light Emitting Diode)
Cara Kerja LED (Light Emitting Diode)
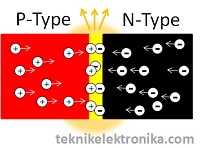
Seperti dikatakan sebelumnya, LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).
LED atau Light Emitting Diode yang memancarkan cahaya ketika dialiri tegangan maju ini juga dapat digolongkan sebagai Transduser yang dapat mengubah Energi Listrik menjadi Energi Cahaya.
3. Rangkaian [kembali]
3.1. PIR and LDR

Cara Kerja :
- Sensor LDR dan PIR mendeteksi objek
- Sesuai dengan program akan berpengaruh pada LED dan motor
3.2. OBSTACLE IR SENSOR ARDUINO UNTUK MEMBUKA PINTU

Cara kerja :
- Sensor IR mendeteksi inframerah
- Program pasa arduino akan menggerakkan motor dan membuat pintu terbuka
3.3 PIR SIMULASI SEDERHANA

3.4 OBSTACLE IR SENSOR SEDERHANA

4. Listing program Arduino [kembali]
Servo servomain;
void loop() {
if (pirState == HIGH && idr >=100)
Servo servomain;
void setup() {
}
void loop() {
if (pirState == HIGH )
4.1 FOR 3.1
#include <Servo.h>
Servo servomain;
int ledPin = 13;
void setup() {
servomain.attach(0);
pinMode(ledPin,OUTPUT);
}
void loop() {
int idr=analogRead(A1);
int pirState=digitalRead(2);
if (pirState == HIGH && idr >=100)
{
digitalWrite(ledPin, HIGH);
servomain.write(180);
}
else if (pirState == HIGH && idr <100)
{
digitalWrite(ledPin, HIGH);
servomain.write(180);
}
else if (pirState == LOW && idr >=100)
{
digitalWrite(ledPin, HIGH);
servomain.write(180);
}
else
{
digitalWrite(ledPin, LOW);
servomain.write(1);
}
}
4.2 FOR 3.2
#include <Servo.h>
Servo servomain;
int ledPin = 13;
void setup() {
servomain.attach(0);
pinMode(ledPin,OUTPUT);
}
void loop() {
int pirState=digitalRead(2);
if (pirState == HIGH )
{
digitalWrite(ledPin, HIGH);
servomain.write(180);
}
else if (pirState == LOW )
{
digitalWrite(ledPin, LOW);
servomain.write(1);
}
else
{
digitalWrite(ledPin, LOW);
servomain.write(1);
}
}
Tidak ada komentar:
Posting Komentar